Eターム第1週 (16回目)レッスンカリキュラム
Eターム第1週(16回目)レッスンカリキュラム
Eターム第1週からのレッスンカリキュラムは以下の通りです。
4C 5Eについてはこちらをご覧ください。 4C 5Eについて
隔週開催のため、レッスンはありません。
くねくねヘビ
学習のねらい:身体的なバランス感覚を養う 周囲や自分の安全に気を配る

| 1C | ヘビの特徴と親しむ為、塗り絵を螺旋状に切り、風になびくおもちゃを作ります。 |
| 2C | デュプロブロックで長い体のヘビをつくり、丈夫なブロックのの繋ぎ方を経験します。 |
| 3C | レゴソフトで大きなヘビを組み立てます。 |
| 4C | ヘビを飛び越える・バランスをとりながらその上を歩くなど運動遊びを行います。 |
こうつうきかん
学習のねらい:交通機関の概念に対する理解を深める
複雑な線路を組み立てて、アクションブロックを使って列車をナビゲートする
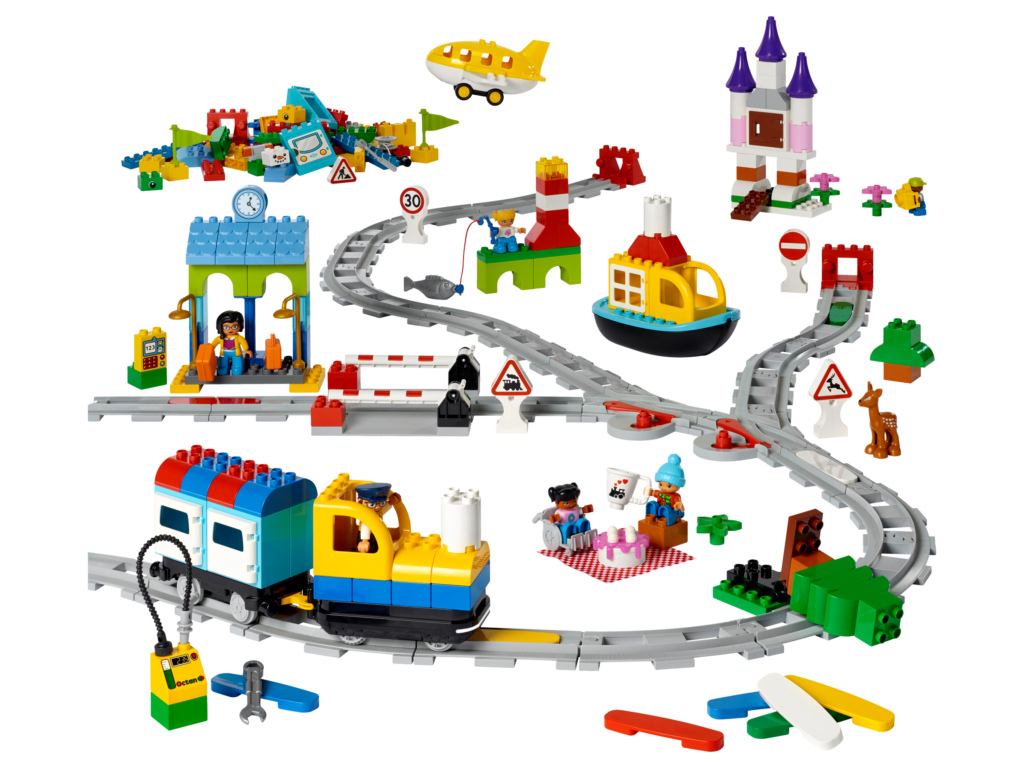
| 1C | 車や鉄道、飛行機や船など様々な交通手段について、それらをどのように運転するのか話ながら、交通機関の概念を導入します。 |
| 2C | 三分岐線路を作り、それぞれの線路の到着地に、飛行機と船を配置します。乗客を乗せた列車がそれぞれの場所に向かいます。 |
| 3C | 目的地の名前(空港、港など)を知っているか、また、それぞれの場所に向かう目的は何があるか考えてみます。 |
| 4C | それぞれの目的地で人以外に運ぶものは何か考えて、クレーンを使って積み込みます。 |
モーターショー
学習のねらい:芸術:デザイナーになって自動車を設計する デザインした自動車の特徴を言葉で伝える

| 1C | モーターショーがどのようなイベントか知っていることを話し合いました。 |
| 2C | デザイナーになってみんなが気に入るような自動車を設計しました。 |
| 3C | 自動車の設計をテストするためにスロープを1つ組み立てて、安定して走ることができるか確認しました。 |
| 4C | モーターショーの設営にし、発表しました。 |
You can do it! 2 ③
学習のねらい:車輪の回転数と走行距離の関係を理解する 数学的な理解を利用して、距離を測定し計算する
サウンドブロックを使用する プログラムでのループブロックの使い方を理解する ジャイロセンサーの使い方の理解を深める
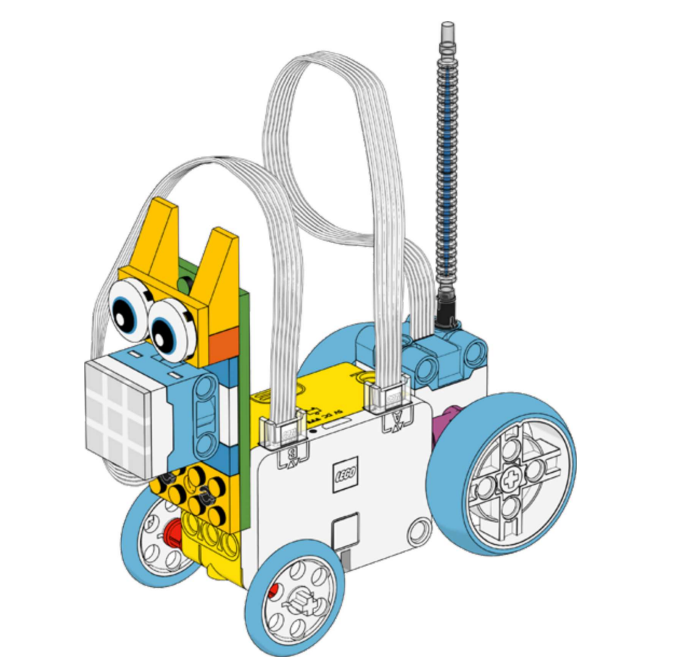
| 1E | 以前のレッスンで使用したジャイロセンサーについて覚えていることを話し合う。 |
| 2E | 犬のダッフィーのモデルのどの部分にジャイロセンサーがあり、どのように使うことができそうか考える。 |
| 3E | ダッフィーを持ち上げたらダッフィーはどのような感情表現をするのか考え、プログラムの作成に挑戦する。 |
| 4E | ダッフィーの物語を考え、作った物語に合わせた動きのプログラムを作成する。 |
| 5E | 出来上がったプログラムをクラスの仲間にデモンストレーションする。 |
ホラーショー
学習のねらい:モデルに押し込まれたビームの形状に応じて2体のレゴ®ミニフィギュアを動かすモデルを組み立てる
機械設計の機能と制約を調べる 機械設計を絵に描く 既存のモデルの修正と変更
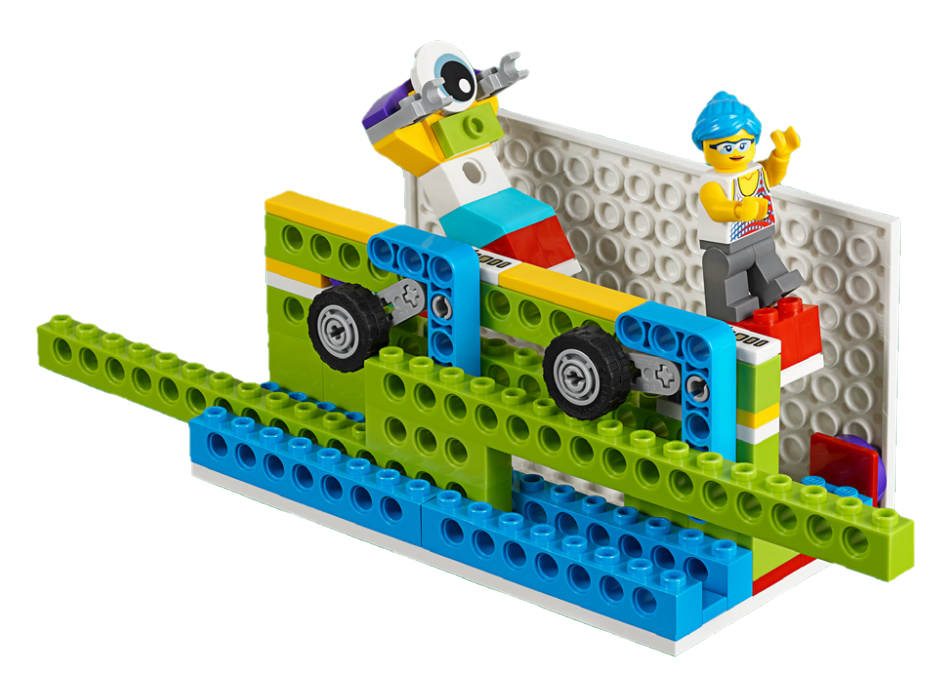
| 1E | 映画やショーで見た怖いシーンについて思い出し、内容や怖かった理由について話し合う。 |
| 2E | モデルを組み立て、動かした時のフィグの動きについて考える。 |
| 3E | モデルを上下さかさまにしたときのモデルの動きを確認し、なぜそのような動きになったのか考察する。 |
| 4E | 様々な長さや段差の異なるビームブロックを作成し、ビームブロックの組み合わせによりモデルの動きがどのように変化するのかを観察する。 |
| 5E | モデルの動きに合わせた怖い話をつくり、お友達と紹介しあう。 |
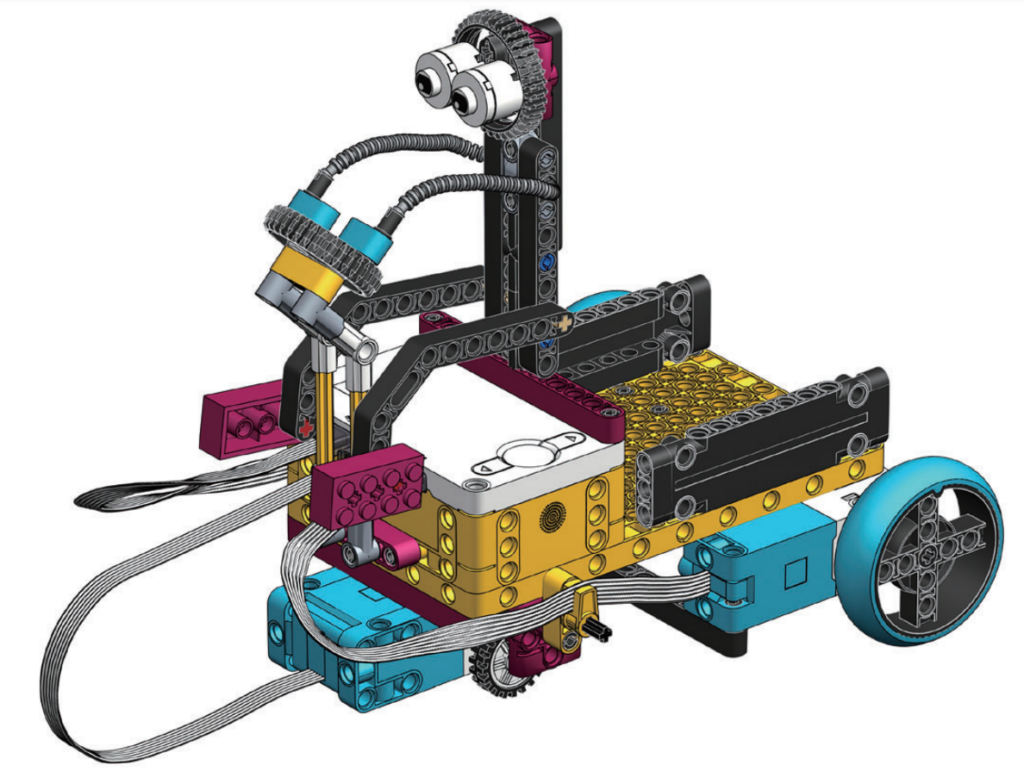
ボブスレー
学習のねらい:ギア機構を使ってそりを滑らすボブスレートラックのモデルを組み立てる
ギア装置について調査を実施して、結果を記録して、結論を出す 既存のモデルを修正または改良する
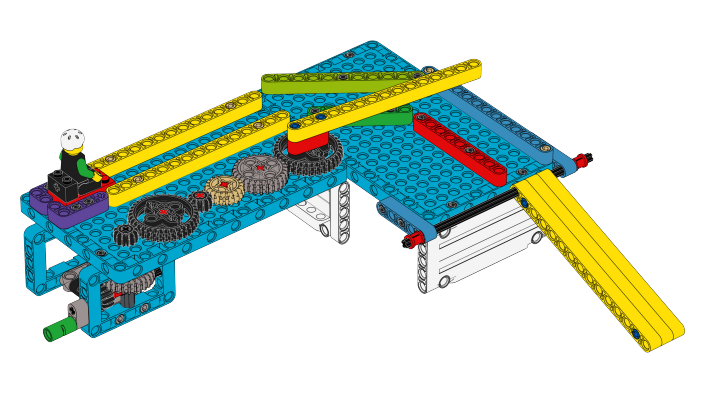
| 1E | ボブスレーという競技について知っていることを話し合う。 |
| 2E | モデルを組み立て、そりが押されて動く動作を確認する。 |
| 3E | 様々なギアコンビネーションを試し、相性の良いギアの組み合わせを記録する。 |
| 4E | 受動ギアと駆動ギアの大きさの違いによる、ギアの回転スピードの違いについて観察をする。 |
| 5E | ギアの組み合わせを調整し、ボブスレーをトラックのゴールまで押し切れるようなモデルへ改良する。 |
リモートしゅじゅつ
学習のねらい:ポート値を用いてロボットアームをコントロールする方法を調べる
ハブに内蔵されたジャイロセンサーの仕組みを活用する
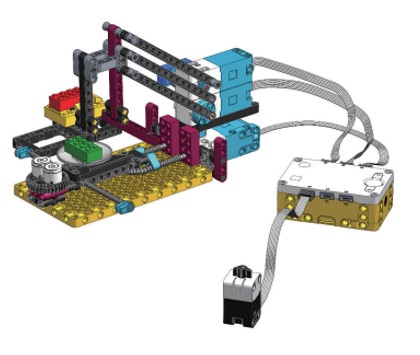
| 1E | 遠隔地にいる患者さんのために、無線ネットワークとロボットテクノロジーを使ったリモート手術について導入する。 |
| 2E | ポート値を活用して、ロボットアームをハブの傾きでコントロールするプログラムを作る。 |
| 3E | ロボットアームのコントロールを実践し、自分のコントローラーのプログラムを仲間たちに説明する。 |
| 4E | フォースセンサーやライトマトリクスを活用して、コントロールが簡単になるようにプログラムする。 |
| 5E | レッスンを通して新たに発見したことや、できるようになったことを仲間たちに共有する。 |
デリバリーサービス②
学習のねらい:ステアリングホイールを使って操縦する車を組み立てる。ステアリングホイールを使ってロボットを操縦する方法を学ぶ
| 1E | インターネットで買い物をした経験を共有しながら、配達をロボットがするとなったら、どのような機能が必要なのか話し合います。 |
| 2E | デリバリーカートを組み立て、ステアリングホイール式で動くプログラムを作ったら、マイブロックを使ってできるだけシンプルなプログラムを試します。 |
| 3E | 各自のマイブロックの内容を共有し、グループになってマイブロックの利点や興味深かったことについて発表します。 |
| 4E | 応用課題として、サウンドやライトを活用して、より便利で安全な機能をデリバリーカーに追加します。 |
| 5E | 自分の作品や習得したことを発表し、発表者へ質問をするディスカッションをします。 |