Kターム第2週 (38回目)レッスンカリキュラム
Kターム第2週(38回目)レッスンカリキュラム
Kターム第2週からのレッスンカリキュラムは以下の通りです。
4C 5Eについてはこちらをご覧ください。 4C 5Eについて
隔週開催のためレッスンはありません。
おやつをつくろう
学習のねらい:調理道具を作ることで丈夫な構造を知る もてなす気持ちを養う

| 1C | 前回のお話の続きを聞いて、カステラを焼く為には何が必要かを話し合います。 |
| 2C | 丈夫な構造を意識して、フライパンやかまどを組み立てます。 |
| 3C | 動物達を呼んで、パーティーをする為に必要な物を考えて準備します。 |
| 4C | カステラを食べる場面を再現します。 |
みえる、みえる
学習のねらい:視点の違いによる見え方の違いに興味を持つ 共同作業をする
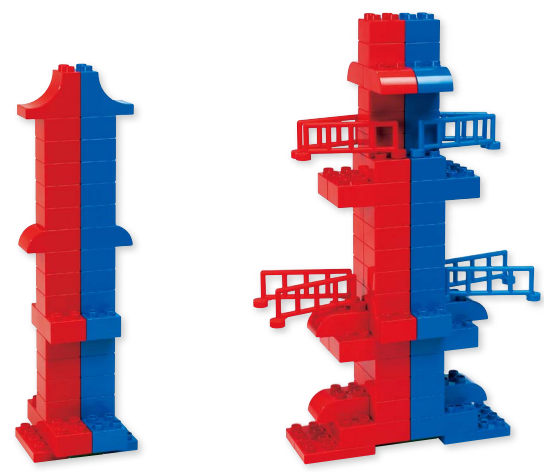
| 1C | 片側は青、もう片側は赤いタワーを、ちがう角度や距離から見ると、見え方が変わることを確認します。 |
| 2C | 見る角度や距離によって見え方が変わる建物を考えて組み立てます。 |
| 3C | 見る距離を変えたり、片目だけで見ると見え方が違うかどうか考えて、実際にやってみて確かめます。 |
| 4C | いろいろな角度と距離の視点の位置からみて、それぞれの場合の見え方について説明します。 |
へんてこな飛行機
学習のねらい: これまでに学習した動くパーツとその機能を利用する 言葉で説明する練習をする

| 1C | これまでの活動を振り返り、飛行機が飛ぶために必要な要素について話し合います。 |
| 2C | できるだけたくさんのパーツを使って、飛ぶ必要のない、変わった飛行機を考えて組み立てます。 |
| 3C | 自分が組み立てた飛行機はなぜ飛ばないのかを考えて説明します。 |
| 4C | 出来上がった飛行機に人や動物を乗せる方法を考え、安全性についても工夫します。 |
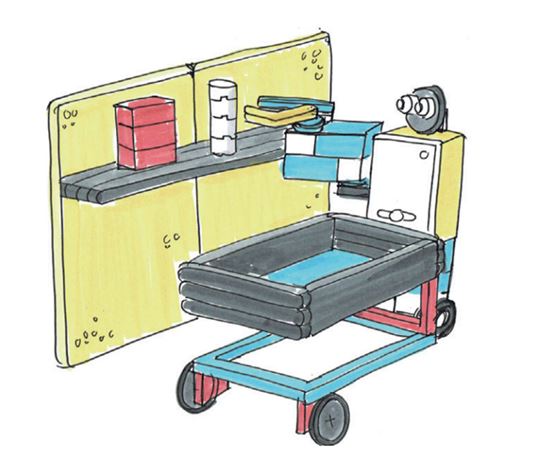
ビッグ・リトルヘルパー②
学習のねらい:移動ブロックの使い方を学ぶ 車を動かすプログラムを作成する テスト、反復、再テストを実施する

| 1E | 前回のレッスンを思い出し、モータープログラムと移動プログラムではモデルの動きがどのように違っていたかについて話し合う。 |
| 2E | ビッグ・リトルヘルパーモデルが運ぶ荷物を組み立てる。 |
| 3E | 指定した場所へ荷物を運ぶ移動プログラムの作成に挑戦する。 |
| 4E | モデルを改良し、積載量を増やしたり飾りつけをしたりしてオリジナルのモデルへ発展させる。 |
| 5E | 出来上がったモデルがデリバリーするところをデモンストレーションし、紹介し合う。 |
うごくフィギュア
学習のねらい:モデルに使われているメカニズムを予想する メカニズムの仕組みを考える モデルを組み立て、自分の予想が合っているか試してみる モデルに手を加えると、機能はどう変わるか調べる 結果を予測し、分析する
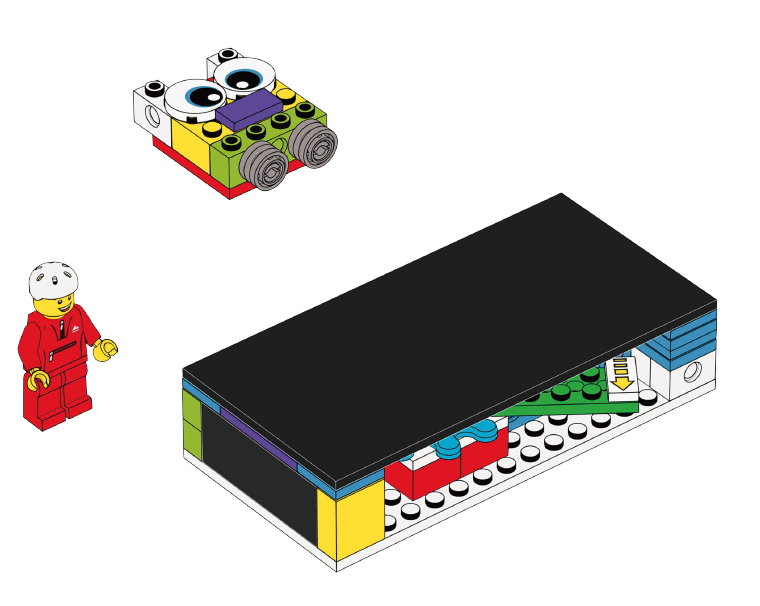
| 1E | とび出すおもちゃで遊んだ経験を尋ね、そのおもちゃにはどんな仕組みが使われていると思うかを話し合う。 |
| 2E | インストラクターが用意した組み立て済みモデルをブラックボックスを開けずに観察をし、ワークに沿って仕組みの考察をする。 |
| 3E | レバーを動かすと人形がとび出る機能がブラックボックスになっているモデルを組み立てる。 |
| 4E | レバーとラック&ピニオンの仕組みがどのように使われているか観察する。 |
| 5E | モデルを飾りつけし、クラスの仲間に紹介する |
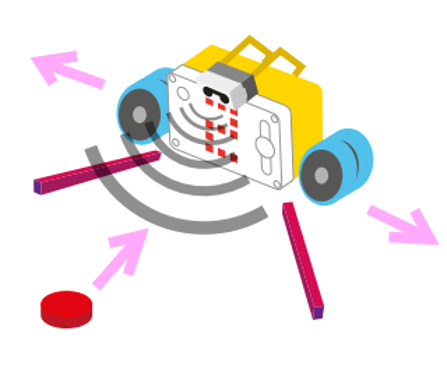
フリーホイーラー
学習のねらい:「 フリーホイーラー」とスロープのモデルを組み立てる フリーホイーラーの移動距離に影響を与える要因を調べる モデルを遠くまで移動させる変数を調べる 結果を予測し、分析する

| 1E | 滑り台で車を走らせる際に車の移動距離に影響を与える様々な要因について、どのような調査ができるか話し合う。 |
| 2E | 「 フリーホイーラー」とスロープのモデルを組み立てる。 |
| 3E | スロープの角度と車の移動距離との関係性について、モデルを走らせて結果を記録する。 |
| 4E | 車の車輪の大きさや重量と車の移動距離との関係性について、モデルを走らせて結果を記録する。 |
| 5E | 実験結果から車の移動距離とその条件との関連性を分析し、位置エネルギーと運動エネルギーについての理解を深める。 |
ロボゴール②
学習のねらい:過去に習得した知識やスキルを活用して、ランダムに移動するゴールを使ったゲームを作成する
| 1E | 前回のレッスンで作成したモデルを確認して、プロジェクトの達成目標を決めます。 |
| 2E | ロボゴールをランダムに動かしたり、得点を計測・表示するプログラムを作成します。 |
| 3E | プログラムをテストして設計書通りに機能するか確認します。 |
| 4E | ゲームのカウントダウンや、ゴールした時のサウンド、クリアの判定など新しいプログラムを追加します。 |
| 5E | レッスンを振り返り、次回の活動目標を決めます。 |
ショップボット②
学習のねらい:過去に習得した知識やスキルを活用して、商品の自動ピックアップマシーンを持ったショップボットを作り上げる
| 1E | 前回のレッスンで作成したモデルを確認して、プロジェクトの達成目標を決めます。 |
| 2E | ショップボットが商品をつかんで持ってくるまでの一連の動作を分解して、一つ一つのプログラムを書き出したフローチャートを作成します。 |
| 3E | フローチャートに沿って、ショップボットを動かすプログラムを作成します。 |
| 4E | プログラムをテストして動作を確認し、様々な商品をピックアップできるようにプログラムを追加します。 |
| 5E | レッスンを振り返り、次回の活動目標を決めます。 |