Dターム第1週 (12回目)レッスンカリキュラム
Dターム第1週(12回目)レッスンカリキュラム
Dターム第1週からのレッスンカリキュラムは以下の通りです。
4C 5Eについてはこちらをご覧ください。 4C 5Eについて
隔週開催のため、レッスンはありません。
ファッションショー
学習のねらい:ブロックと他素材を組み合わせて、柔軟な作品を作る 自己演出をする

| 1C | 絵本から、変装やおしゃれについて話し合います。身につける装飾品に何があるかを考えます。 |
| 2C | ひもにブロックを順序よくはさみ、ネックレスを作ります。その他に、身につける部分を決め、それに合う装飾品を考えて組み立てます。 |
| 3C | ファッションショーに見に来るお客さんのためにカメラやステージを作ります。 |
| 4C | 各自がステージの上に立ち、自分の作った作品を紹介します。 |
じどうしゃレース
学習のねらい:いろいろな表面と摩擦の大きさの関係に興味を持つ、速さを調べる

| 1C | 表面がいろいろな違った素材の坂道の上を、台車のブロックを走らせて、摩擦について知りました。 |
| 2C | チューブを組み合わせて中に台車を滑らせ、チューブの中にタオルをひいたときとの時間を比べました。 |
| 3C | チューブの中にタオルがない時とある時の所要時間の違いはなぜ起きるのかを考えました。 |
| 4C | チューブの中をボールと毛糸を巻いたボールを転がすとしたらどう違うか、予想してから確かめました。 |
のっぽさんのものがたりとちびさんのおはなし
学習のねらい:釣り合いの取れた大きさを考える 物語を話す練習をする

| 1C | 巨人と小人のお話を聞き、登場人物の大きさや場面を想像しました。 |
| 2C | それぞれの大きさを考えて使うブロックを選び、巨人と小人を組み立てました。 |
| 3C | 巨人と小人の名前を考え、住んでいるところや持っているものなどの大きさを考えました。 |
| 4C | 巨人と小人の食べ物や道具などを組み立て、それらを使ってお話しをしました。 |
ながさをはかるモンスター
学習のねらい:長さの見積もりと計測をする 10を一つの単位として数える

| 1C | ブロックのモンスターを使って、いろいろなものを計測することができることを知りました。 |
| 2C | ワークブックにある10で数えるモンスターを組み立てました。 |
| 3C | 組み立てたモンスターを使って、教室内にあるいろいろなものの長さを測りました。 |
| 4C | モンスターを使って背の高さを測る方法を考えたり、距離を測る方法を考えてやってみました。 |
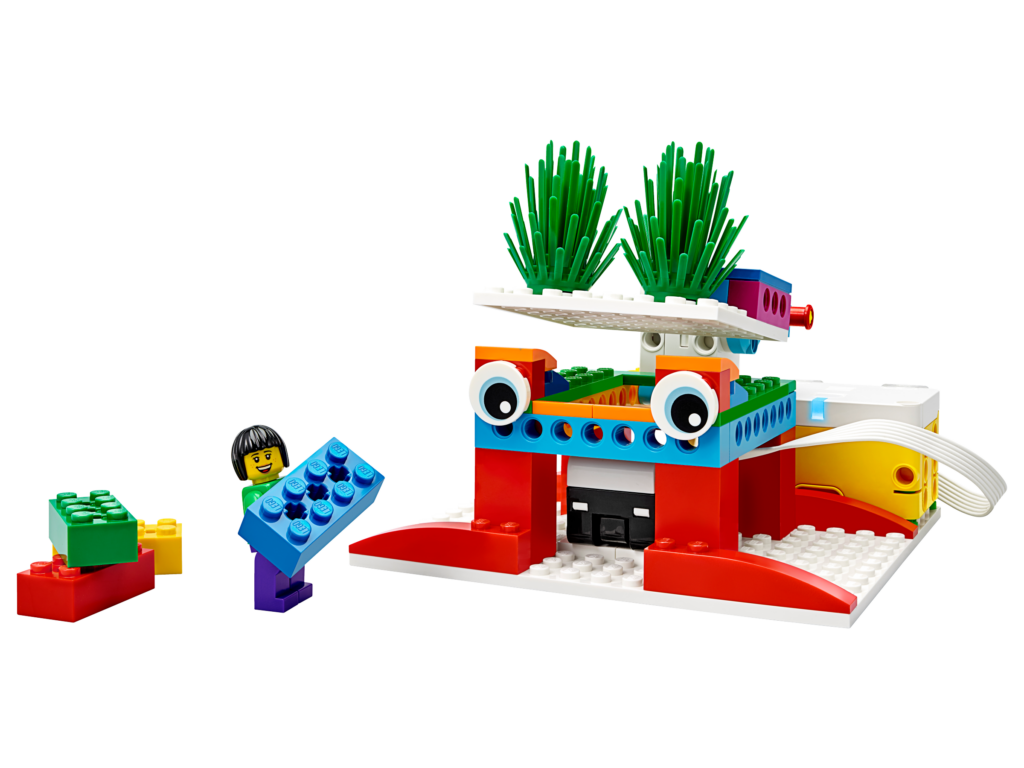
ダンシング・ディレクター
学習のねらい:コーディングバー」上のスタッドの配置に応じて回転する可動式アームが付いた胴体モデルの構築

| 1E | 劇場やサーカスのショーについて考え、ダンスの催しについて関心を高める。 |
| 2E | モデルを組み立て、機械構造の仕組みを観察する。 |
| 3E | 「コーティングバー」のスタッドの配列を変更し、モデルの動きがどのように変化するか観察をする。 |
| 4E | 「コーティングバー」のスタッドの配列を自由に調整し、モデルの飾りつけを行う。 |
| 5E | 音楽を流し、音に合わせてモデルを踊らせ、モデルの動きと表現を楽しむ。 |
ゴミモンスター
学習のねらい:ゴミが環境に与える影響について考える カラーセンサーに反応するモデルを組み立てる モデルに創造的な変更を加える ディスプレイブロックと録音ブロックを使用する プログラムでシーケンスを使う
| 1E | ゴミ捨ての問題について話し合い、どのようなゴミ箱だったら適切な場所にゴミを捨てたくなるか考える。 |
| 2E | モデルを組み立て、ゴミ箱の蓋の開閉の仕組みとゴミを認識するカラーセンサーについて観察をする。 |
| 3E | モデルに青色のゴミを入れると音を出すプログラムを作成する、録音のプログラムに挑戦する。 |
| 4E | モデルに入れるゴミの色によってアクションがかわるプログラムの作成に挑戦する。 |
| 5E | 改良したモデルをクラスの仲間に実演しフィードバックをし合う。 |
ナノボット②
学習のねらい:最短経路ブロックを使ったナノボットのグラブのコントロール
「もし~でなければ~」と繰り返しブロックを使った高度なプログラムの作成
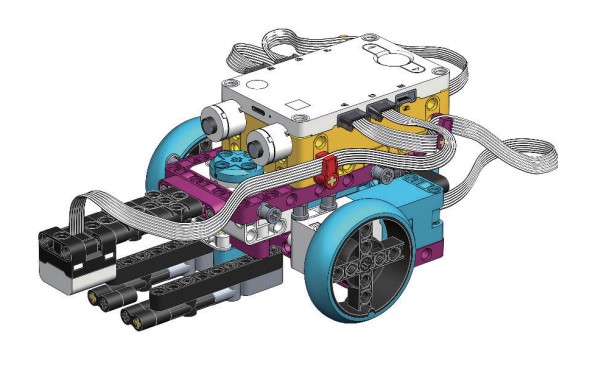
| 1E | ナノボットが傷ついた細胞を取り除くために必要な機能を考えます |
| 2E | ナノボットを制御する場合分けを考えて、赤いブロックを発見した時は取り除く動く、それ以外はライントレースを繰り返すプログラムを作ります。 |
| 3E | 完成したプログラムについて、動作の精度を高める工夫を中心に説明します。 |
| 4E | 複数のブロックを取り除いたり、赤以外のブロックも取り除くようにプログラムを発展します。 |
| 5E | レッスンを通じて発見したことやできるようになったことを仲間たちに共有します。 |
パーソナルトランスポーター
学習のねらい:ジャイロセンサーを使った動作のコントロール。ハブのピッチ角とロール角を調べる。「AND」の使い方を学習する
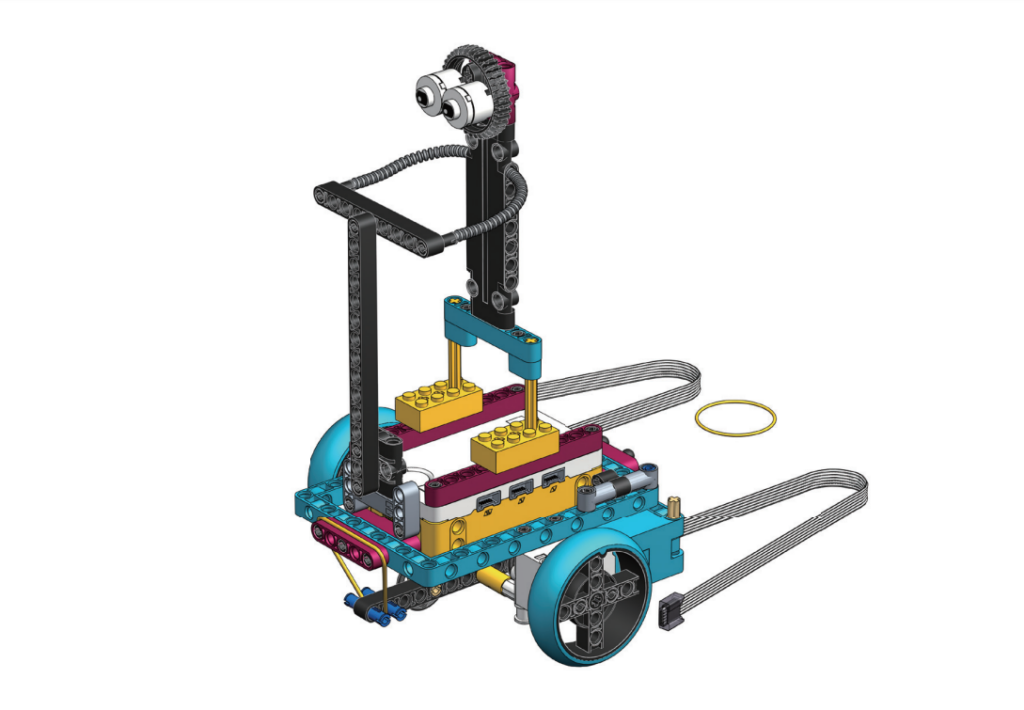
| 1E | 自分の体を傾けてその方向に動く乗り物を試した経験について話ながら、どのような機能になっているのか意見を出し合います。 |
| 2E | パーソナルトランスポーターを組み立てたら、モデルの傾き方向を調査し、傾いた方向に動くプログラムを作ります。 |
| 3E | 空想市内観光都市のフィールド内をツアーさせ、自身のモデルの特徴を説明し、失敗したことを共有します。 |
| 4E | 前回のレッスンを応用した自動速度制御の仕組みを追加したり、急カーブするプログラムを考案したりします。 |
| 5E | 自分の作品や習得したことを発表し、発表者へ質問をするディスカッションをします。 |