Dターム第3週 (14回目)レッスンカリキュラム
Dターム第3週(14回目)レッスンカリキュラム
Dターム第3週からのレッスンカリキュラムは以下の通りです。
4C 5Eについてはこちらをご覧ください。 4C 5Eについて
隔週開催のため、レッスンはありません。
ふねをつくろう
学習のねらい:風の力で動く帆のあるふねに着目する


| 1C | 絵本より、船の種類について学びます。 はさみを使い、折り紙を半分に切り、ふねの帆を作ります。 |
| 2C | インストラクターと同じ手順でふねを組み立てます。 |
| 3C | 人形や荷物がのせられる様に改良し、ふねの働きを再現します。 |
| 4C | 海や港、島などの風景を作り、ふねの行き来を楽しみます。 |
よーい、どん!
学習のねらい:動作の方向を示す言葉を知る、協力して計画と作業を進める

| 1C | 上を通る、下をくぐる、周りを回る、中を通り抜けるの、それぞれの言葉と動きを確認しました |
| 2C | みんなで協力して、人形のための障がい物を分担して組み立て、それらを合わせてコースにしました |
| 3C | コースの中で、どのようにチューブを利用することが出来るか、その可能性を考えました |
| 4C | コースを飾り付けて競技場を組み立て、タイムを計るなどして、人形を使った競走を楽しみました |
ボウリング
学習のねらい:エンジニアリング:構造によって安定感が変わることを知る ゲームの得点を記録して競うことを楽しむ

| 1C | ボウリングのルールとどのように点数になるのかを話し合いました。 |
| 2C | ボウリングゲームの道具を組み立てました。 |
| 3C | チームに分かれてボウリング大会の準備をしました。 |
| 4C | ボウリング大会をして、それぞれ得点をつけて、合計数を計算しました。 |
You can do it! 2 ①
学習のねらい:車輪の回転数と走行距離の関係を理解する 数学的な理解を利用して、距離を測定し計算する
サウンドブロックを使用する
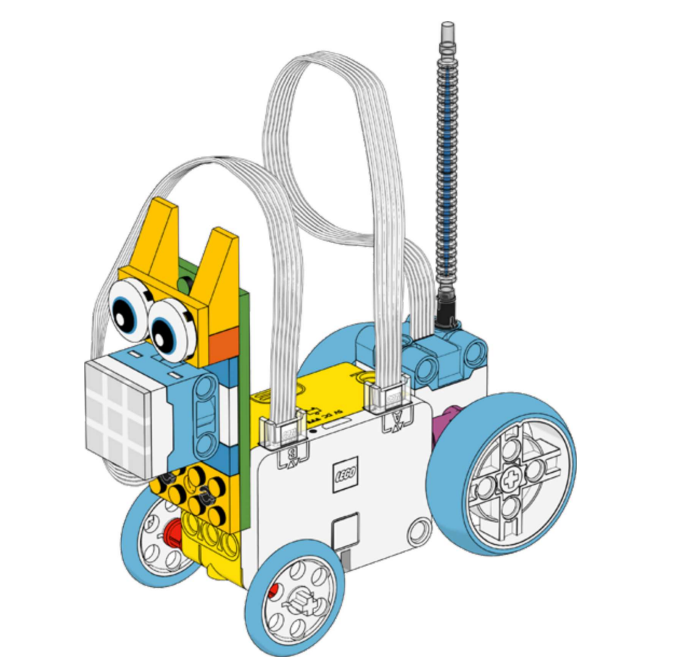
| 1E | ペットについて話し合い、機械のペットができたらどのような動きをしそうか考え、イメージを膨らませる。 |
| 2E | 犬のダッフィーのモデルを組み立てる。 |
| 3E | 完成したモデルを観察し、モーターの位置によってどのようにモデルが動きそうか、またライトマトリックスはどのように使われているかを考察する。 |
| 4E | モーターを動かすプログラムを作成し、プログラム実行をして、モーターの回転数とモデルが進む距離についての関係性について考える。 |
| 5E | 「早く前に進み、2回吠えて、ゆっくり後ろに下がる」という動きのプログラミングに挑戦する。 |
ギア・モンスター
学習のねらい:ベベルギアを使って、ノブを回して操作できる胴体と回転する頭部を持ったアニメフィギュアを組み立てる 機械設計の探求と特定 調査を実施して、結果を記録して、結論を出す ペアでの競争による、細かい動作をさせるスキルの向上 既存のモデルの修正と変更

| 1E | モデルの正面だけを見せて動かし、裏側の目に見えない仕組みがどのようになっているのか考察をする。 |
| 2E | モデルを組み立て、連動して動くギアを観察しそれぞれの回転方向について記録する。 |
| 3E | モデルにホイールを追加し、ホイールを落とさないルールのバランスゲームで遊ぶ。 |
| 4E | バランスゲームを振り返り、モデルの動きの速さや操作の難易度について振り返る。 |
| 5E | ギアコンビネーションを変更しモデルに改良を加える。 |
ゴールシュート
学習のねらい:キッカーと、得点係のいるゴールのモデルを組み立てる テコ、4 節リンク機構、ラッチなど単純な機構を特定する
調査を実施して、結果を記録する ゲームのルールを設定する 既存の解決策を改良する
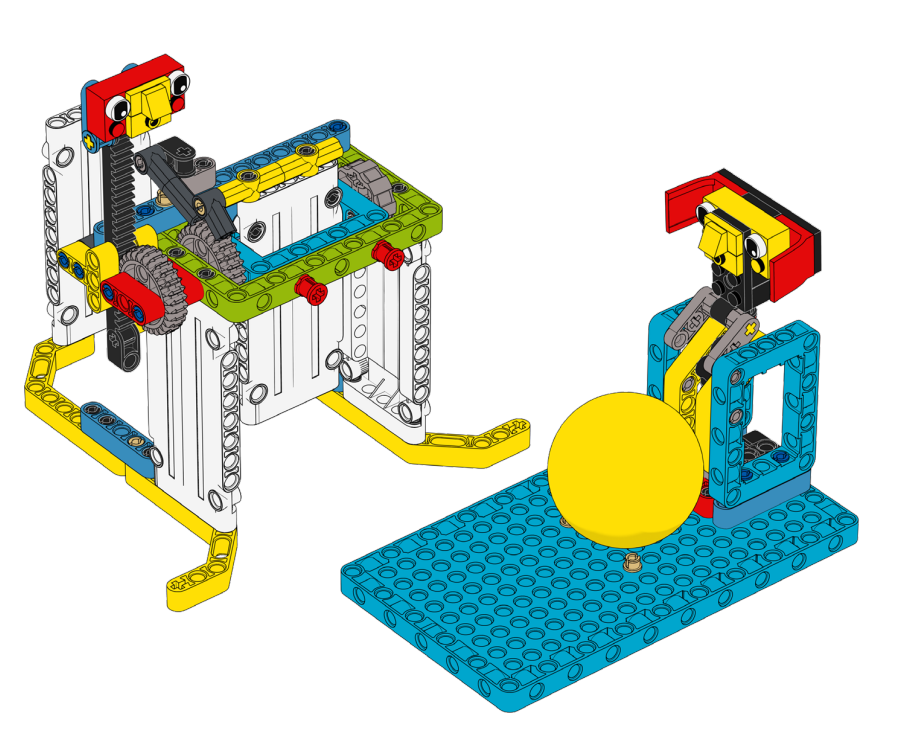
| 1E | サッカーのフリーキックについて話し、ルールと必要な道具について考える |
| 2E | モデルを組み立て、キッカーモデルとゴールモデルの動きを観察する |
| 3E | キッカーモデルのバネと四節リンク機構の仕組みとその機能を調べ、足の長さを変えることによってボールの飛距離にどのような変化が生まれるか実験する |
| 4E | ゴールモデルのラチェットとラックギアの仕組みとその機能を調べ、ゴールの回数と得点加算によるモデルの動きについて理解する |
| 5E | クラスの仲間とルールを設定し、お互いのモデルを使用しゲームをして遊ぶ |
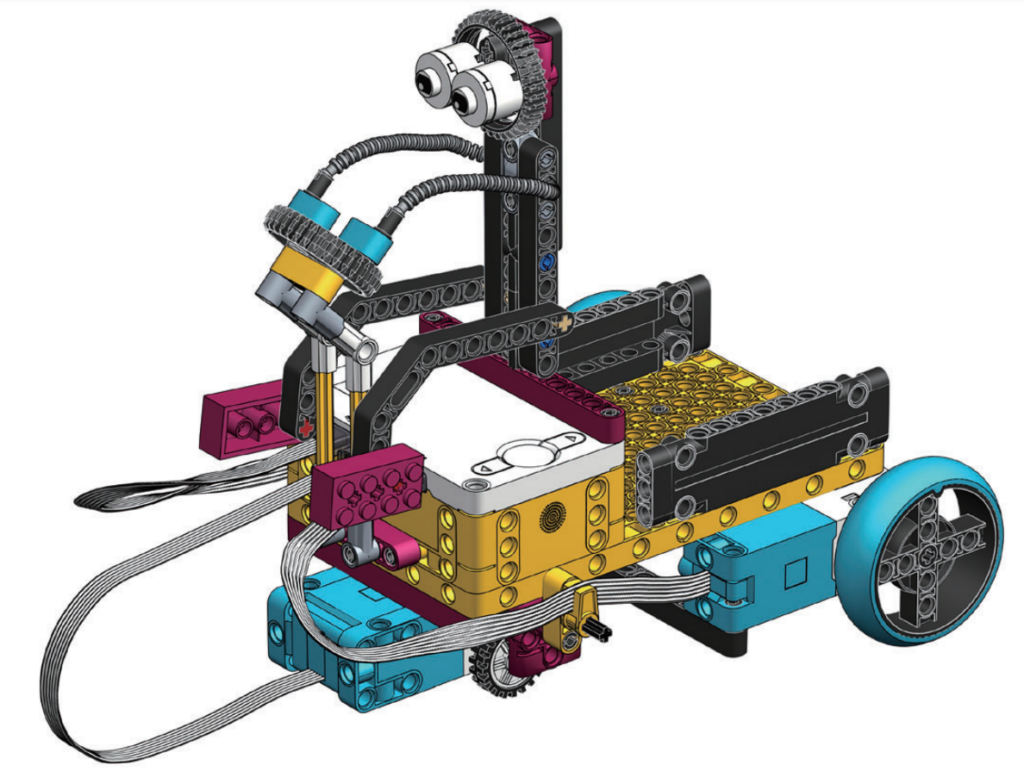
ブリッキーのスキャン②
学習のねらい:変数を用いてプログラムの読み出しをする カラーセンサーを用いて物体を識別する
| 1E | 前回の活動を振り返り、ボディスキャナーにさらに追加する機能を考える |
| 2E | ライトマトリックスを用いて検査状況を知らせるプログラムや、体にある異常を数えるプログラムを作る。 |
| 3E | 仲間たちとお互いのモデルをテストして、機能を確認する |
| 4E | センサーやモーターを追加して新しい機能をボディスキャナーに追加する |
| 5E | レッスンを通して発見したことやできるようになったことを仲間たちに共有する |
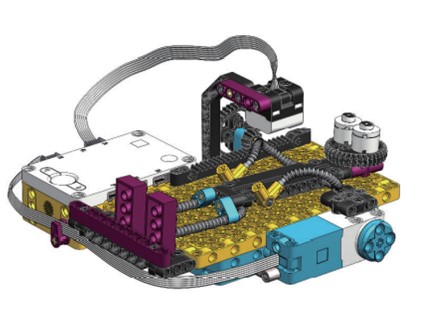
デリバリーサービス①
学習のねらい:ステアリングホイールを使って操縦する車を組み立てる。ステアリングホイールを使ってロボットを操縦する方法を学ぶ
| 1E | インターネットで買い物をした経験を共有しながら、配達をロボットがするとなったら、どのような機能が必要なのか話し合います。 |
| 2E | デリバリーカートを組み立て、ステアリングホイール式で動くプログラムを作ったら、マイブロックを使ってできるだけシンプルなプログラムを試します。 |
| 3E | 各自のマイブロックの内容を共有し、グループになってマイブロックの利点や興味深かったことについて発表します。 |
| 4E | 応用課題として、サウンドやライトを活用して、より便利で安全な機能をデリバリーカーに追加します。 |
| 5E | 自分の作品や習得したことを発表し、発表者へ質問をするディスカッションをします。 |