Eターム第2週 (17回目)レッスンカリキュラム
Eターム第2週(17回目)レッスンカリキュラム
Eターム第2週からのレッスンカリキュラムは以下の通りです。
4C 5Eについてはこちらをご覧ください。 4C 5Eについて
ひまわり
学習のねらい:背の高さが違うひまわりを制作して、「高い・低い」と高さに触れる 植物に興味をもつ

| 1C | 絵本を読んでひまわりの花が咲くまでの成長段階を観察します。 |
| 2C | ブロックとすずらんテープの工作素材を使い、ひまわりの花を制作します。デュプロ®ブロックでさらに、大きなひまわりを組み立てます。 |
| 3C | 大きさが違うひまわりの花を並べて迷路をつくります。 ひまわりの迷路の中で、高いひまわりはどちらでしょう?高さを比べることで違いを考えます。 |
| 4C | 迷路の中には昆虫がいます。 捕まえた昆虫をいれる虫かごを組み立てます。 |
バスにのって
学習のねらい:他の自動車と違う特徴を捉え、バスの働きを理解しコミュニケーションを図る


| 1C | 図鑑より、他の車と違いや特徴(バス停があり乗客の運ぶ仕組み)を話し合い理解します。 |
| 2C | インストラクターのモデルを観察し、ブロックでバスを組み立てます。 |
| 3C | バスが到着する目的地を組み立てます。 |
| 4C | バスが運行している仕組みを実際に遊びながら体験します。 |
くねくねおちる
学習のねらい:重力について知る 何が起こるか予想する

| 1C | 物が落ちる様子を見て、重力という言葉とその簡単な意味を知りました。 |
| 2C | くねくねのパーツを使って、ヘビの形のようなチューブを組み立てました。 |
| 3C | チューブにボールを入れるとどうなるか予想し、ボールを入れて確かめました。 |
| 4C | 真っ直ぐなパーツでチューブを組み立て、くねくねのチューブとのボールの落ち方の違いを観察しました。 |
きんじょのたてもの
学習のねらい:高さと幅の観点から、建物の大きさについて説明する デザインと機能性について考える

| 1C | 自分の家を思い出したり写真などの資料を見たりして、家の高さと幅の外観について説明しました。 |
| 2C | 色や形に特徴があり、窓とドアと屋根がある大きな家を組み立てました。 |
| 3C | 出来上がった家について順番に説明し、高さや幅の広さの順に並べてみました。 |
| 4C | 家以外の建物を、その機能に合わせて高さや幅をデザインして組み立て、街をつくりました。 |
くいしんぼうのイモムシ
学習のねらい:長くて安定した構造の物を作る。長さと強度の関係を知る。

| 1C | くいしんぼうのイモムシの話を聞いて、何が起こるか想像しました。 |
| 2C | デュプロ®ブロックを使って、くいしんぼうのイモムシと穴のあるリンゴを組み立てました。 |
| 3C | イモムシをリンゴに通して、壊れないモデルと壊れるモデルの違いについて考えました。 |
| 4C | さらに長くても壊れにくいイモムシの組み立て方を考えて、工夫して組み立てました。 |
パペット・コントローラ
学習のねらい:機械式アタッチメントが付いた、紐を引いて動かすパペットを組み立てる 機械設計を調べる
調査を実施して、結果を記録して、結論を出す 4節リンク機構を使った足の動きの練習 既存のモデルの修正と変更
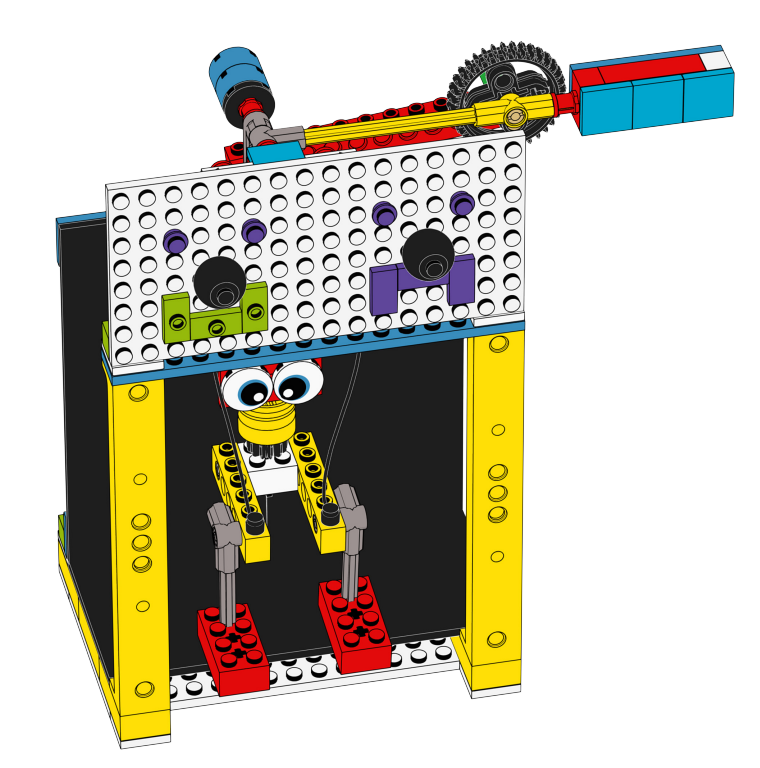
| 1E | 人形劇について話し合い、操作方法や使われている仕組みについてイメージを膨らませる。 |
| 2E | モデルを組み立て、ハンドル操作と脚の動きの連動性について観察する。 |
| 3E | モデルに組み立てをさらに進め、機械式のアタッチメントをモデルに付け加える。 |
| 4E | 機械式アタッチメントの4節リンク機構の仕組みとその動きを調べる。 |
| 5E | パペットの動作を変更できるようにモデルを組み換えたり、ステージを飾り付けしたりして、モデルを発展させる。 |
ワッキー・ウォッシュ
学習のねらい:ループとセンサーを使った実験 プログラムでシーケンスを使う
待機ブロックについて学ぶ 疑似コードを作成する
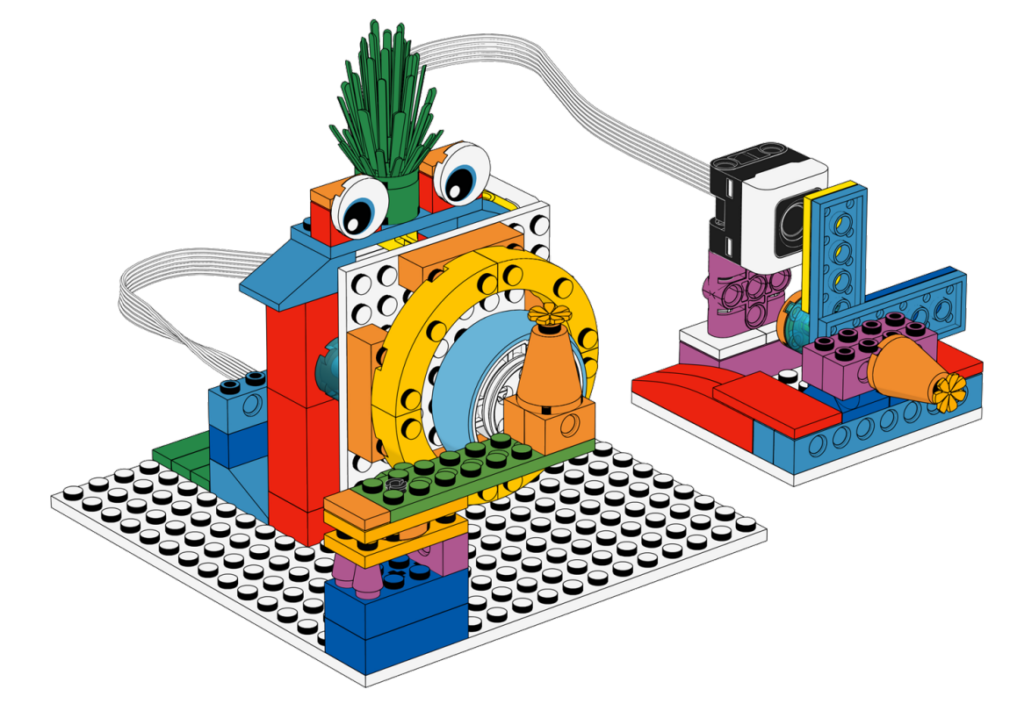
| 1E | 洗濯機について知っていることを話し、動きの仕組みや衣類の違いによる様々な機能設定について考える。 |
| 2E | モデルを組み立て、洗濯機のドラムが回転する仕組みについて観察する。 |
| 3E | 洗濯機の段階的な回転スピードや回転回数について考察し、フローをワークに記入してプログラムを作成する。 |
| 4E | さらに組み立てを続け、モデルにカラーセンサー機能を付け加える。 |
| 5E | カラーセンサーを使用し衣類の種類に合わせて洗濯サイクルを変更するプログラムの作成に挑戦する。 |
スローロボット
学習のねらい:スローロボットがアームを動かす速度や角度とボールの飛距離との間にある関係を調べる
距離センサーやハブのボタンでスローロボットを操作できるようにプログラムする
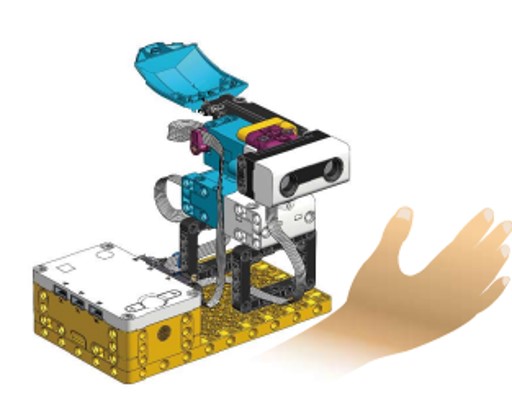
| 1E | 自分でボールを投げる真似をしながら、テニスや野球で使われるボールマシンの投球角度や距離について話し合う。 |
| 2E | ボールを投げるスローボットを組み立て、正確な位置にボールを投げられるよう、速度やアームの形などを工夫する。 |
| 3E | スローイングゲームを実施し、大会の結果に基づいて改善の方法を発表する。 |
| 4E | 距離センサーで的を見つけ、そこに正確にボールを投げられるように改造する。 |
| 5E | レッスンを通して新たに発見したことやできるようになったことを共有する。 |
スマートレストラン①
学習のねらい:ロボットが操作するレストランのモデルを組み立てる。プログラム構造を整理するマイブロックを作成する。
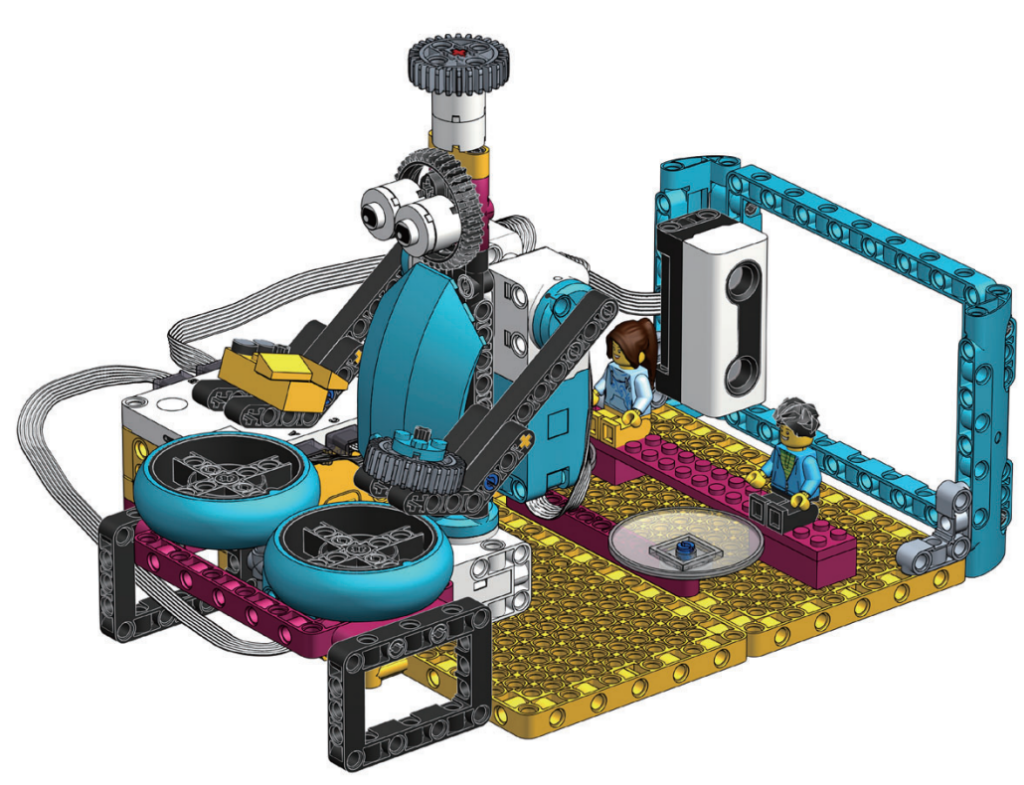
| 1E | レストランの経験をイメージし、レストランに入ってから出るまでの流れを共有しながら、ロボットで代用できることは何か意見を出し合います。 |
| 2E | スマートレストランのモデルを組み立てて、レストランでの一連の流れをプログラムします。マイブロックを活用して整理した構成にします。 |
| 3E | 自分の作ったレストランの機能とプログラムをプレゼンテーションします。 |
| 4E | 自身のレストランを完成させたり、タイマー機能を使った調理やセンサーでの空席チェック機能、支払いのやり取りなどの応用に挑戦します。 |
| 5E | 自分の作品や習得したことを発表し、発表者へ質問をするディスカッションをします。 |