Eターム第3週 (18回目)レッスンカリキュラム
Eターム第3週(18回目)レッスンカリキュラム
Eターム第3週からのレッスンカリキュラムは以下の通りです。
4C 5Eについてはこちらをご覧ください。 4C 5Eについて
きんぎょ
学習のねらい:魚の身体の特徴、生態について知る 日本の夏祭り(きんぎょすくい)の様子に興味を持つ。



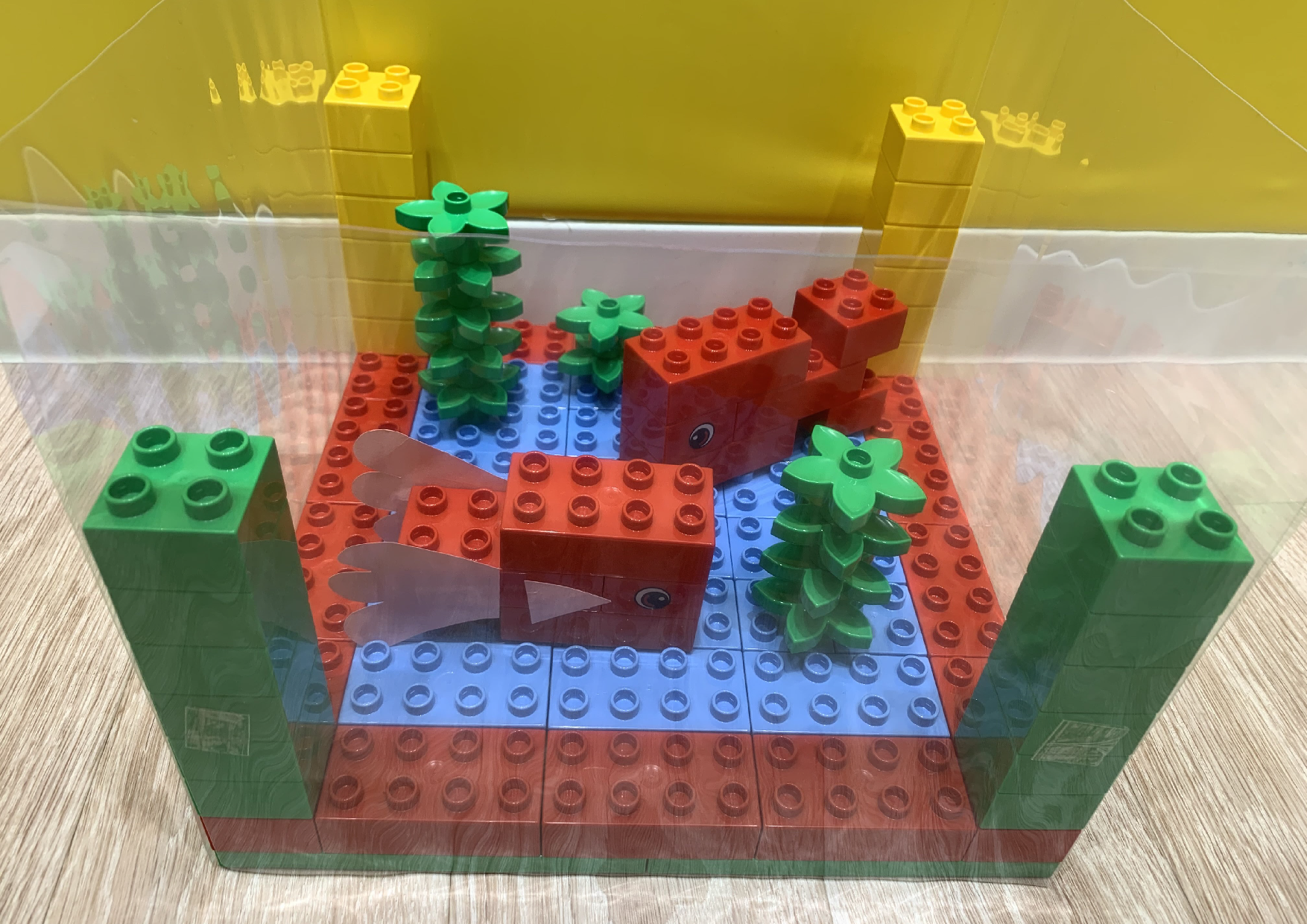
| 1C | 縁日に行ったことがありますか?夏祭りの様子を話し合います。 絵本を読み、金魚の生態に着目します。 水の中にすむ、泳ぐためにひれがあることを伝えます。 |
| 2C | ブロックや折り紙などの工作素材を使って、それぞれ大きさの違う金魚を組み立てます。 |
| 3C | お池に金魚を泳がせて金魚すくいを楽しみます。すくった金魚の持ち帰り用の袋を作ります。 |
| 4C | 金魚鉢をつくり、家で飼育する方法を考えます。 |
どろんこの犬をきれいにしよう
学習のねらい:イメージを膨らませて物語の世界を想像する 物語に登場した犬を立体的に表現する



| 1C | 「どろんこな犬」の話を聞き、どうような物語だったかを振り返ります。 |
| 2C | インストラクターと共にブロックで犬を立体的に組み立てます。 |
| 3C | 物語を思い出したり、想像して、犬の遊び場を考えて作ります。 |
| 4C | それぞれがつくり上げた遊び場を案内します。 |
おとぎばなし
学習のねらい:現実とファンタジーは違うということを知る お話をする

| 1C | おとぎ話の登場人物や出来事は現実に存在するのか、空想の世界だけなのかを話し合いました。 |
| 2C | おとぎ話の登場人物やキャラクターをブロックで組み立てました。 |
| 3C | 組み立てた作品が登場するのはどんなお話かを説明しました。 |
| 4C | お話に登場する他の登場人物も組み立て、お話ごっこをして楽しみました。 |
くだりざかをくらべよう
学習のねらい:数学:測定の練習を行う 高さと距離を比較する
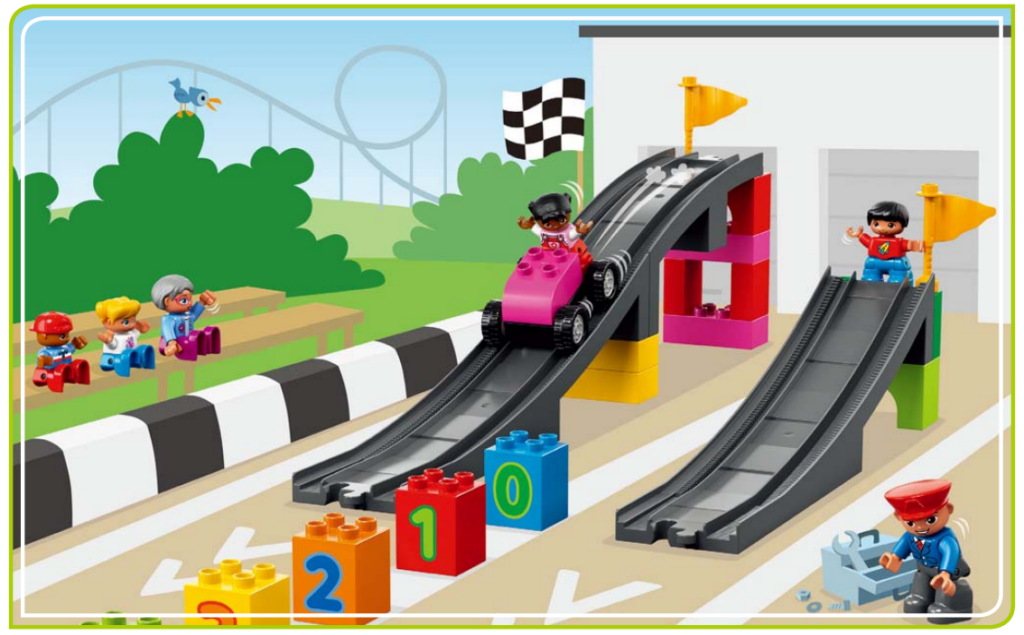
| 1C | スロープについてどのようなものか、身の回りのどこにあるのかなどを考えました |
| 2C | 2つの高さの違うスロープをつくり、車を走らせました。 |
| 3C | 結果を記録して比較して違いを発見しました。 |
| 4C | できるだけ遠くまで車を走らせるために、スロープを組みなおして試しました。 |
はしのこうぞう
学習のねらい:つり橋の支柱やワイヤーの原理を知る 橋の機能について考える
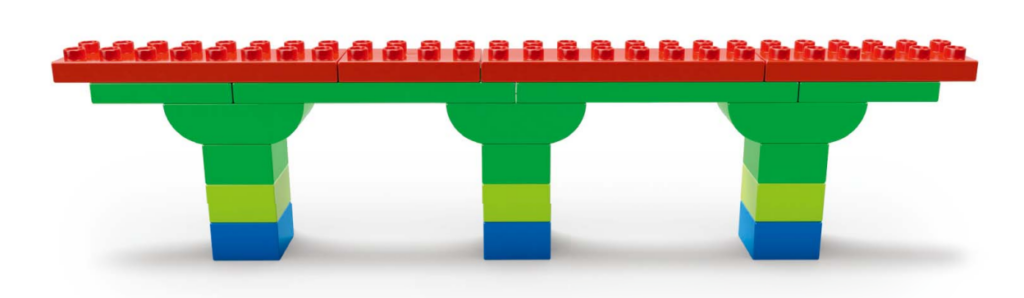
| 1C | いろいろな橋を思い出し、特につり橋の特徴と機能について考えました。 |
| 2C | 橋を頑丈にしたり、安定させたりするために、土台や支柱の構造に注意して組み立てました。 |
| 3C | 土台や支柱が橋を頑丈にしたり、安定させたりするのにどのように役立っているか、話し合いました。 |
| 4C | 自分たちが作った橋の安定性をさらに高めるために実際の橋を参考にして工夫して組み立てました。 |
ビッグ・バス
学習のねらい:ループとセンサーを試す 数学的な思考を身につける チームの一員として、協力的に取り組む

| 1E | 路線バスについて話し合い、決められたルートを時間通りに繰り返し運行する必要性に気づく。 |
| 2E | モデルを組み立て、使用されているモーターとセンサーがどのようにモデルを動かすのかを考えながら観察をする。 |
| 3E | A地点とB地点のバス停を行き来するようプログラミングを作成する。 |
| 4E | バス停の標識を各色に変更し、標識の色よって通過と停車を区別し自走するプログラムを作成する。 |
| 5E | カラーセンサーの向きを変更し、後続のバスに連動して動作を開始するプログラムを考え、クラスの仲間とバスの動きを連動させることに挑戦する。 |
チームプレイ
学習のねらい:機械設計が異なる2つのピッチャーとキャッチャーを組み立てる 単純な機構を特定する 調査を実施して、結果を記録する ペアで協力して、ゲームを設計する パートナーと意見や感想を交換する
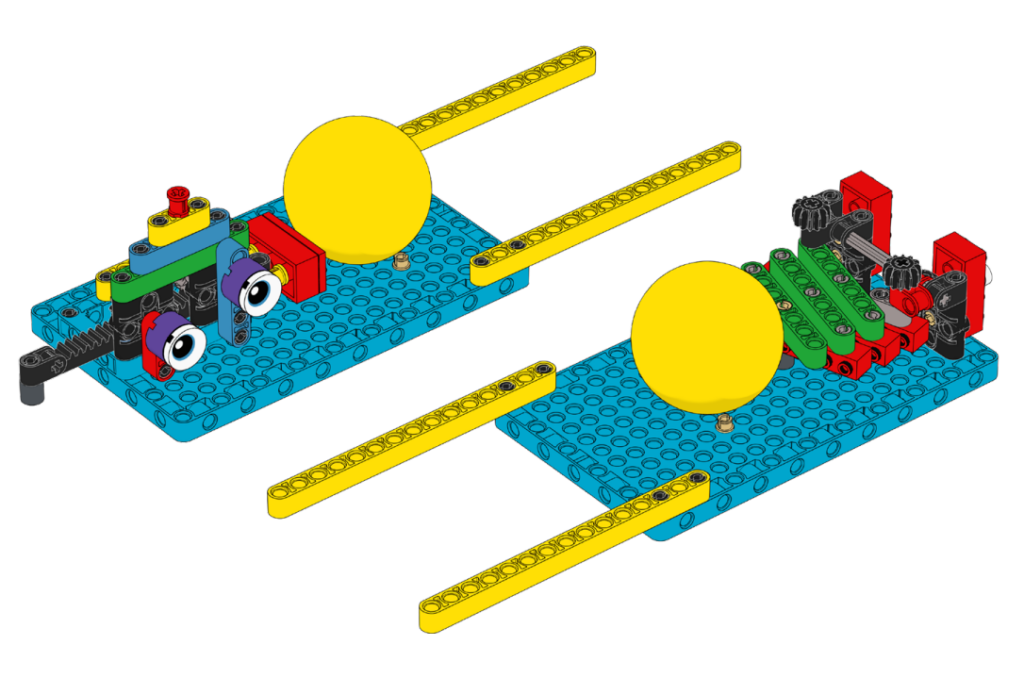
| 1E | チームで行うゲームでのゲーム性やルールについて話し合う |
| 2E | モデルを組み立て、ピッチャーとキャッチャーの役割ついて観察する |
| 3E | 3種類のピッチャーでポールを打ち、それぞれの発射速度と壊れにくさを体感し使いやすさを評価する |
| 4E | ペアを組み、各ペアでチーム戦におけるゲームルールを作成する |
| 5E | クラスの仲間と4Eで考えたゲームで競い合い、より楽しいゲームになるようにモデルの改良やルールの改定を行う |
まとあて
学習のねらい:モーターの設定を変えて予想外の動きをするターゲットモデルをプログラムする
採点システム、タイマー設定などのゲームの機能をプログラムする
| 1E | お祭りにある的あてゲームについて導入しながら、その的は止まっていたか動いていたか、動いていたらどのように動いていたかなど確認する。 |
| 2E | 的あてモデルを組み立てたら、モーターの動きとモデルの動きの関連の予測、変数を使った採点システムの作成、タイマー機能を使ったゲーム時間の設定をする。 |
| 3E | 自信のあるプログラム、面白いと思うプログラムを仲間たちに紹介する。 |
| 4E | モデルを工夫してゲームを難しくさせたり、カウントダウンや、最終得点を表示させたり、的あてゲームを工夫する。 |
| 5E | レッスンを通して新たに発見したことや習得したことを仲間たちに共有する。 |
スマートレストラン②
学習のねらい:ロボットが操作するレストランのモデルを組み立てる。プログラム構造を整理するマイブロックを作成する。
| 1E | レストランの経験をイメージし、レストランに入ってから出るまでの流れを共有しながら、ロボットで代用できることは何か意見を出し合います。 |
| 2E | スマートレストランのモデルを組み立てて、レストランでの一連の流れをプログラムします。マイブロックを活用して整理した構成にします。 |
| 3E | 自分の作ったレストランの機能とプログラムをプレゼンテーションします。 |
| 4E | 自身のレストランを完成させたり、タイマー機能を使った調理やセンサーでの空席チェック機能、支払いのやり取りなどの応用に挑戦します。 |
| 5E | 自分の作品や習得したことを発表し、発表者へ質問をするディスカッションをします。 |