Gターム第2週 (24回目)レッスンカリキュラム
Gターム第2週(24回目)レッスンカリキュラム
Gターム第24週からのレッスンカリキュラムは以下の通りです。
4C 5Eについてはこちらをご覧ください。 4C 5Eについて
隔週開催のためレッスンはありません。
ワニさんのおうち
学習のねらい:物語の場面や動物を表現する 立体的な構造を体感する

| 1C | みんなでお話の主人公の名前や登場する動物の種類を決めて、お話作りをします。 |
| 2C | 各自のイメージでワニさんをブロックで組み立てます。 |
| 3C | ワニさんの住む家を作り、「ドアを開けると、そこはジャングルだった…」と言う場面を個々に創作します。 |
| 4C | 完成した自分の作品で遊びながら家の中を案内します。 |
歌うモンスター
学習のねらい:歌で伝える 冒険物語を考える

| 1C | 怪物や動物が登場する歌を聴き、歌に出てきた動物を確認し、その様子を想像しました。 |
| 2C | 歌に出てきた怪物と、怪物と一緒に散歩に行く登場人物を考えて組み立てました。 |
| 3C | 歌に出てきた動物は、どんな場所に住んでいるかを考えました。 |
| 4C | 農場を組み立て、歌をうたいながら農場に動物を並べ、冒険物語を作りました。 |
パチャパチャ
学習のねらい: ホイールと歯車で回転する仕組みを知る 力が物体に与える影響を予測する

| 1C | ピンホイール、メリーゴーラウンド、自動車のホイールなど、様々な種類の回転について考えました。 |
| 2C | 組み立てカードに示される水落ちゲームを組み立てました。 |
| 3C | 右回りと左回りの2方向に回転できることなど回転方向を意識しながらゲームをしました。 |
| 4C | 水に落ちるときの人はどんな表情をするか考えました。 |
アニマルアラーム②
学習のねらい:カラーセンサーの使い方について理解を深める プログラムでの繰り返しブロックの使い方を理解する 既存のモデルを改良する
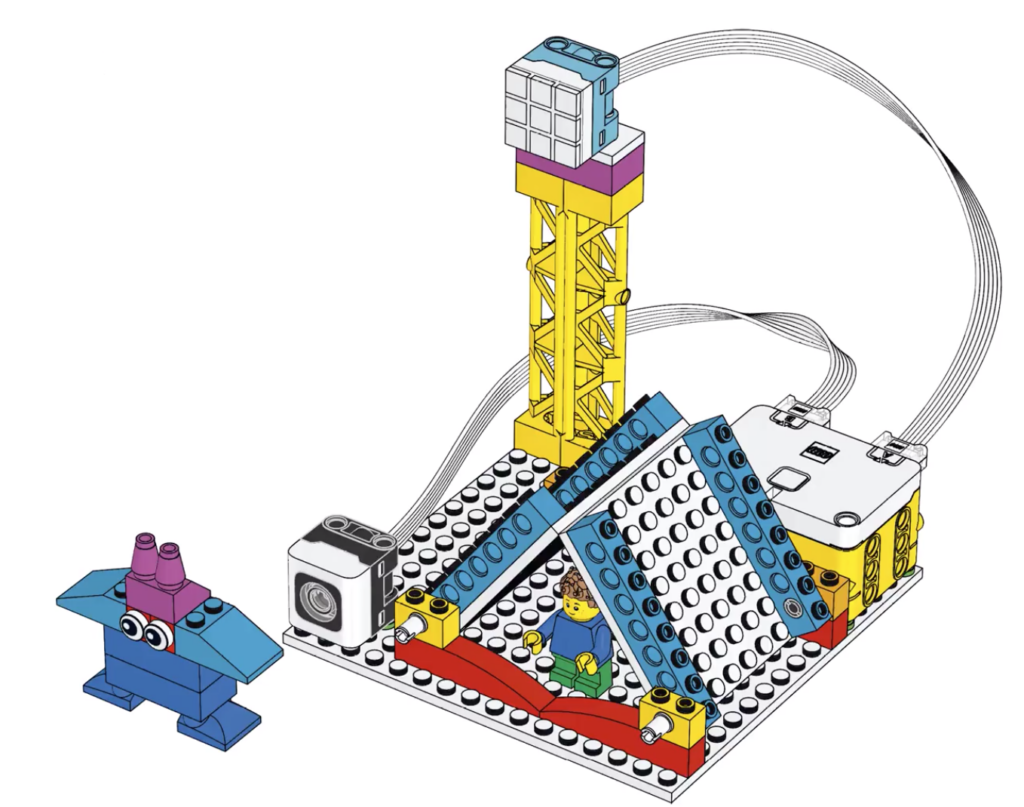
| 1E | 前回のレッスンを思い出し、危険を知らせるアラームにどのようなセンサーとプログラムを使ったか活動を思い出す。 |
| 2E | モデルを組み立て、カラーセンサーとライトマトリクスを使用したプログラムを作成する。 |
| 3E | ライトマトリクスをモーターに付け替え、テントが開閉するようなモデルに改良を加える。 |
| 4E | カラーセンサーの条件に合わせてテントが開閉するプログラムの作成に挑戦する。 |
| 5E | 完成したプログラムをクラスの仲間に実演し、紹介をする。 |
まと当て
学習のねらい:車輪付きの乗り物と発進用のスロープから構成されたモデルを組み立てる スロープの角度が車輪付きの乗り物の移動距離に与える影響を調べる 結果を予測し、分析する
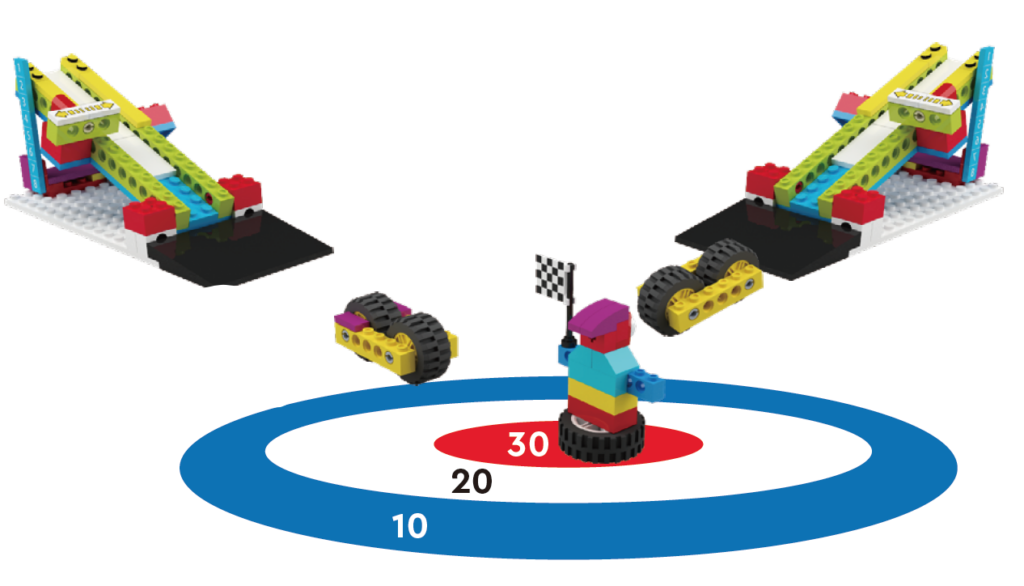
| 1E | 車輪のついた乗り物をねらった位置にピタリと止める為に、調べる必要がある記録と実験について話し合う。 |
| 2E | モデルを組み立て、車と発射装置(スロープ)それぞれについて観察する。その機械設計について考える。 |
| 3E | スロープの角度が変わると発射された車の移動距離にどのような違いがでるのか、実験して記録する。 |
| 4E | スロープと車を使い、的への接近率を競い合うゲームをする。 |
| 5E | ゲームの結果を見比べてスロープの角度と移動距離の結果について考察し、理解を深める。 |
フリーキック
学習のねらい:キッカーとゴールのモデルを組み立てる 力のベクトル、衝突する2つの物体の運動、傾斜面の形が、ボールの軌道や力に与える影響について調べる 結果を予測し、分析する
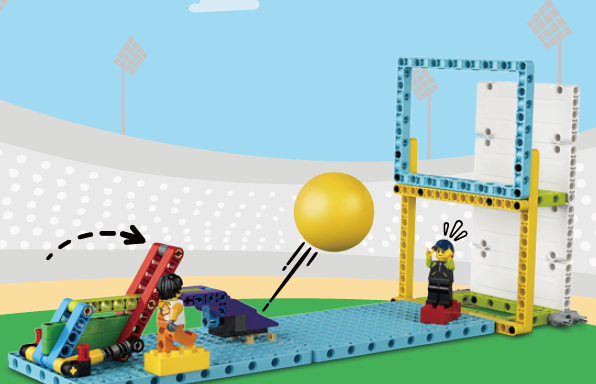
| 1E | 止まっているボールを蹴る時に、高いボールを蹴りたい時と低いボールを蹴りたい時とでは足の位置や方向がどのように違うのか考え話し合う。 |
| 2E | モデルを組み立て、キッカーに使用されているバネ構造について観察をする。 |
| 3E | 組み立てた3種類の足(靴)の違いを理解し、それぞれの足(靴)によってボールを蹴った時の軌道にどのような違いが起こるかを実験し記録する。 |
| 4E | ゴールを上方向に拡張し、より高い軌道でボールを蹴ることのできる足(靴)の作成に挑戦する。 |
| 5E | クラスの仲間と、足(靴)やボールの軌道について実験結果を共有しあい、傾斜面と力のベクトルについて理解を深める。 |
ピアノ
学習のねらい:ピアノと距離センサーの仕組みを理解し、センサーからの距離に応じて音階を変えるプログラムの作成 音楽拡張ブロックを活用する
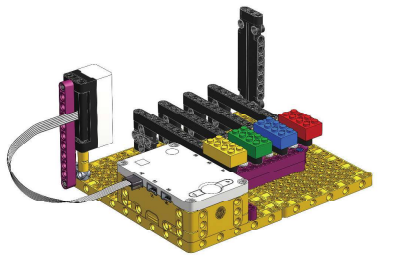
| 1E | ピアノの音が出る仕組み、打楽器か弦楽器かなどについて話しながら、超音波という音波を「打つ」ピアノ作りに挑戦することを伝えます。 |
| 2E | ピアノのモデルを組み立てる前に、超音波センサーの測定値を調査します。組み立てたピアノが超音波センサーの測定距離で異なる音を出すプログラムを作ります。 |
| 3E | ピアノの仕組みについて説明し、演奏で難しいところや、簡単にできる方法を提案してもらいます。 |
| 4E | 音符をカラーコードに変換したり、鍵盤を追加する方法を探ります。 |
| 5E | レッスンを通して新たに発見したことや習得したことについて仲間たちに共有します。 |
スマートグラブ
学習のねらい:様々なハンドの調査や設計を行いながら、機械式ロボットアームを組み立てる
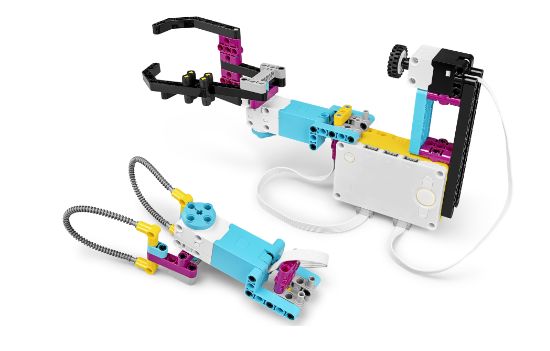
| 1E | 人の代わりにロボットアームが活躍する作業や環境について話し合い、逆に、ロボットアームを使うマイナス点についても意見を出し合います。 |
| 2E | ロボットハンドをペアで二種組み立てて、様々な重さや形のものでロボットハンドの性能を試します。 |
| 3E | それぞれのロボットハンドの長所と短所を挙げて、互いにコメントを出し合います。 |
| 4E | とても重たいもの、小さなものを持ち上げるハンドの設計や、人の手を全く借りずに動けるようモーターを追加したり、応用に取り組みます。 |
| 5E | 自分の作品や習得したことを発表し、発表者へ質問をするディスカッションをします。 |