Kターム第1週 (37回目)レッスンカリキュラム
Kターム第1週(37回目)レッスンカリキュラム
Kターム第1週からのレッスンカリキュラムは以下の通りです。
4C 5Eについてはこちらをご覧ください。 4C 5Eについて
ありがとう
学習のねらい:人に対する優しい気持ちや物を大切にする気持ちを味わう どうぞ、ありがとうの言葉のやりとりをする

| 1C | プレゼントをもらった時の気持ちを考えます。 |
| 2C | レンガ積みを意識して箱を組み立てます。 「りぼん」のようになるよう十字を意識してふたを作ります。 |
| 3C | レゴソフトでイスとテーブルを組み立てます。 テーブルでお友達とプレゼント交換をして開封します。 |
| 4C | 親子やお友達とプレゼント交換をしたり、 交換し「ありがとう」「どうぞ」を言葉にして感謝の気持ちを表現します。 |
森の探検
学習のねらい:物語の世界を創造する 食べ物を立体的に表現する

| 1C | 野ねずみの兄弟が森の中で見つけたお話について話し合い、イメージを共有する。 |
| 2C | 森の中で見つけた食べ物の特徴を捉え、立体的に表現します。 |
| 3C | 自分自身がお話の主人公となるようなお面を作ります。かごを持って森へ食べ物を探しに行きます。 |
| 4C | お話の中にある場面を再現します。 |
おはなししましょう
学習のねらい:会話とは何かを考える 劇の台詞として何か言ってみる

| 1C | お話の状況をもとに登場人物の会話を考え、会話でお話を伝えられることに気づきます。 |
| 2C | お友達と動物園に行くお話をするための舞台となる動物園を組み立てます。 |
| 3C | これまでに動物園に行った時に、誰とどんな会話をしたかを思い出します。 |
| 4C | クラスのお友達とペアになって、レゴの人形を使ったお話を会話によって演じます。 |
きゅうじょヘリコプター
学習のねらい: 働く乗り物について考える 翼と対比してプロペラの特徴を知る

| 1C | 山の岩棚に落ちた馬を救助する物語を聞いて、ヘリコプターでの救助方法について知ります。 |
| 2C | 馬のリバティーを救助するために必要なものを考えて、それを備えたヘリコプターを組み立てます。 |
| 3C | 組み立てたヘリコプターを使ってリバティーを救出するための計画を考えます。 |
| 4C | いろいろなブロックで大きな山を組み立て、順番にリバティーを救助する場面に挑戦します。 |
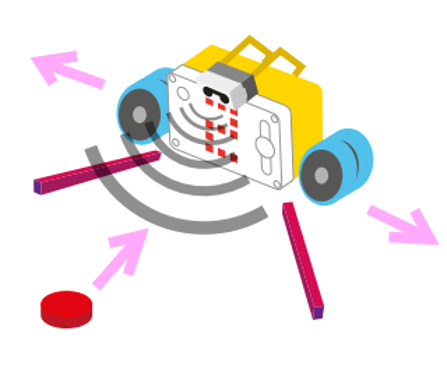
ビッグ・リトルヘルパー①
学習のねらい:移動ブロックの使い方を学ぶ 車を動かすプログラムを作成する テスト、反復、再テストを実施する

| 1E | デリバリーについて知っていることや、荷物を運ぶ配達員の役割について話し合う。 |
| 2E | 組み立てガイドに沿ってモデルを組み立てる。 |
| 3E | モーターがどのようについているか観察し、それによってモデルがどのように動くことが出来そうか考察する。 |
| 4E | モーター(青色アイコン)プログラムを作成し、モデルがどのように動くかを記録する。 |
| 5E | 移動(ピンク色アイコン)プログラムを作成し、モデルを動かす。モータープログラムと移動プログラムの動きの違いについて考える。 |
はかり
学習のねらい:隠れたメカニズムが含まれた秤のモデルを組み立てる 隠れたメカニズムの仕組みについて調べる モデルを使って物体の重さを調べる モデルに手を加えると、機能はどう変わるか調べる 結果を予測し、分析する
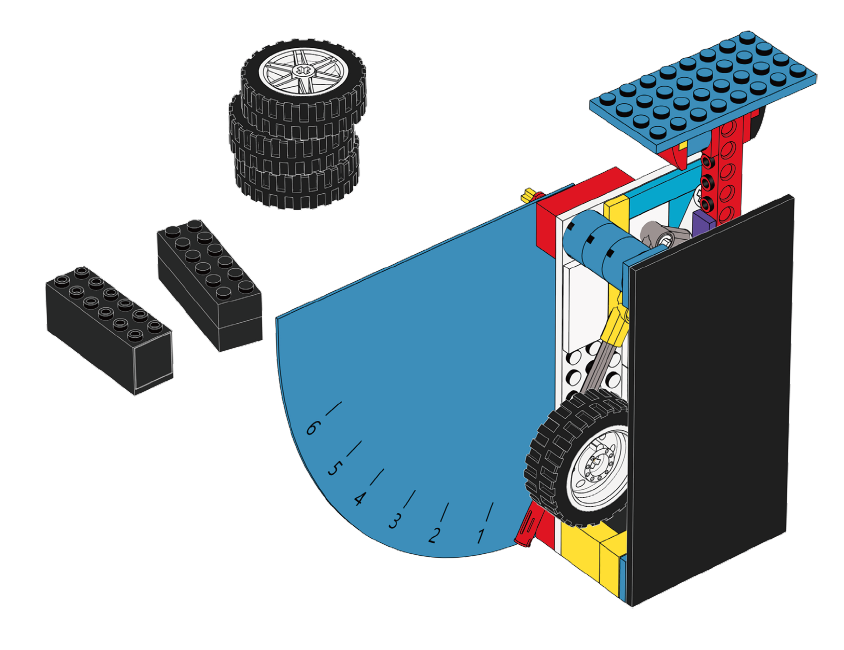
| 1E | 何かの重さを量ったことがあるか経験を思い出し、その時に使われていたはかりの特徴について話し合う。 |
| 2E | 上皿天秤の針(重りのタイヤ)を振り上げる機能がブラックボックスになっているはかりを組み立てる。 |
| 3E | てことリンク機構の仕組みがどのように使われているか観察をし、上皿の上下と振り上がる針(重りのタイヤ)の動きの関係性について考察する。 |
| 4E | 針(重りのタイヤ)を別の重さのパーツに付け替え、針の重さの違いによる針の振りあがり方の違いについて観察する。 |
| 5E | はかりを活用し、特定のパーツと同じ重さのパーツを探し当てるゲームをする。 |
トラッシュ・トルーパー
学習のねらい:設計指示書に従って、設計スキルを高める 美学の原則について理解し、応用する 高度なプログラミングブロックを使用して、車両を複数の方向に動かす
| 1E | 散らかってしまったゴミを効率的に回収するマシンについて考える。 |
| 2E | 基本モデルを組み立て、モーターの動きで効率的に散らかったゴミを回収できる機能を持ったモデルに発展させる。 |
| 3E | モデルの移動の動きをプログラミングし、ゴミ回収に適切なルートで動くように調整する。 |
| 4E | 楽しくゴミ回収ができるように音楽を演奏する機能を加える。 |
| 5E | 完成した作品でゴミ回収をデモンストレーションし、クラスの仲間に紹介する。 |
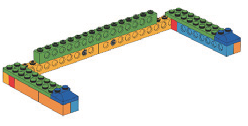
ロボゴール①
学習のねらい:過去に習得した知識やスキルを活用して、ランダムに移動するゴールを使ったゲームを作成する
| 1E | ボールとゴールを使うスポーツについて知っていることを仲間たちに共有します。SPIKEプライムで自動でゴールが動いて、得点を計測するゲームを作る方法を話し合います。 |
| 2E | 設計書を確認して、自分の作るロボゴールの機能を決めます。 |
| 3E | ワークブックにロボゴールの設計図を書きます。 |
| 4E | 設計図に基づいてロボゴールとボールを打ち出す装置を組み立てます。 |
| 5E | レッスンを振り返り、次回の活動目標を決めます。 |
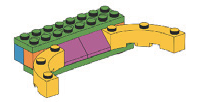
ショップボット①
学習のねらい:過去に習得した知識やスキルを活用して、商品の自動ピックアップマシーンを持ったショップボットを作り上げる
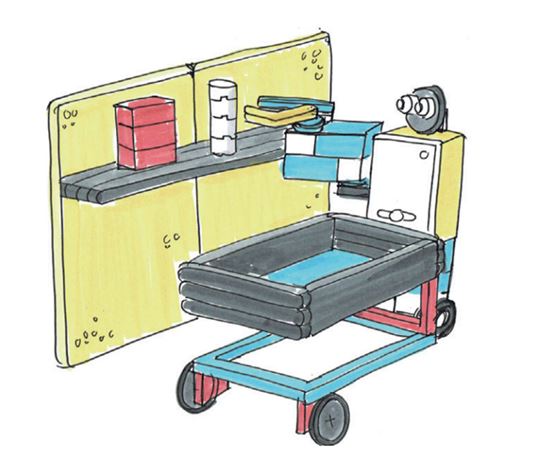
| 1E | 実生活の買い物の場面を思い出し、商品を自動でピックアップするマシーンの利便性について話し合います。 |
| 2E | 設計書を確認して、ショップボットに追加する機能を確認します。 |
| 3E | ワークブックにショップボットの設計図を書きます。 |
| 4E | お店の中を自動で移動する機構と商品をつかむ機構を持ったロボットを組み立てます。 |
| 5E | レッスンを振り返り、次回の活動目標を決めます。 |